2.4.1 Programme Pos6DP
Type de données API : Dans le dossier « Movidrive Pos 6DP » déclarer les UDT :
- 01-Reception-Pos6DP
- 02-Emission-Pos6DP
- 03-CdeDataPos6DP
- 04-EtatDataPos6DP
Figure 50 : Movidrive Pos6DP
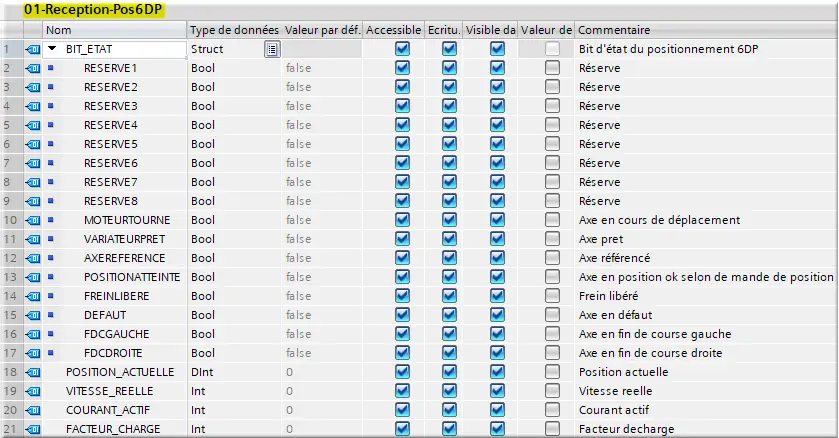
Figure 51 : UDT 01-Reception-Pos6DP
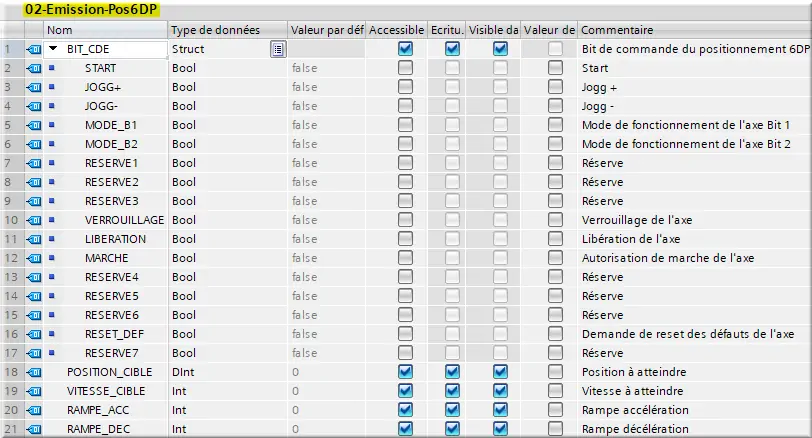
Figure 52 : UDT 02-Emission-Pos6DP
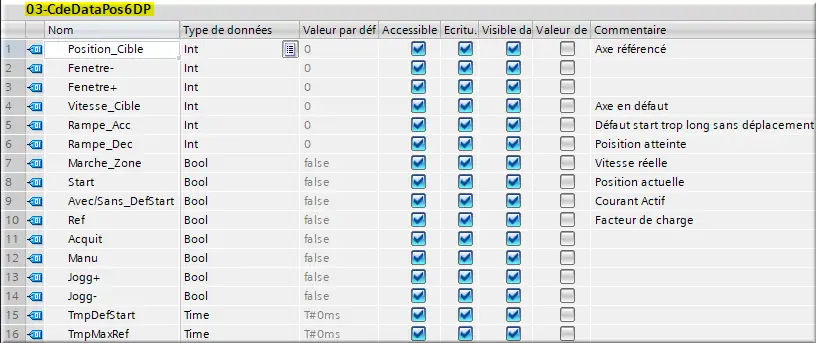
Figure 53 : UDT 03-CdeDataPos6DP
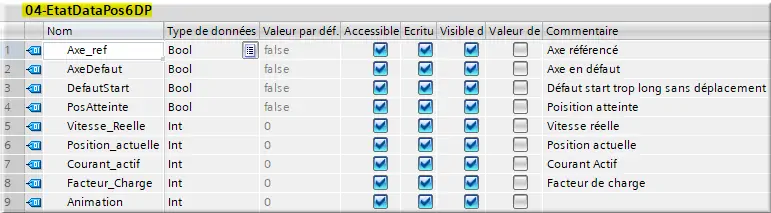
Figure 54 : UDT 04-EtatDataPos6DP

Figure 55 : E/S réseau M2
Adresser les données Movidrive dans la table de variables « Entrées_Sorties_Réseau » grâce aux UDT créés :

Figure 56 : Moteur état et cde M2
Pour Moteur M2 ETAT :
- Nom « Etat_M2 »
- Type de données « 01-Reception-Pos6DP »
- Adresse « I0.0 » (Voir adresse dans la configuration)
- Commentaire « Réception des données moteur M2 »
Pour Moteur M2 COMMANDE :
- Nom « Cde_M2 »
- Type de données « 02-Emission-Pos6DP »
- Adresse « Q0.0 » (voir adresse dans la configuration)
- Commentaire « Emission des données moteur M2 »
Dans « Blocs de programme » :
- Ajouter un nouveau groupe « FC211_GESTION_MOTEUR_M2 »
- Insérer dans ce groupe un bloc FC « FC211_GESTION_MOTEUR_M2 » et un bloc DB « DB211_GESTION_MOTEUR_M2 ».
- Ajouter aussi les FC214 et FC215 correspondant aux séquences de référencement et de mode auto. Dans les DB214 et 215 la structure est la même.
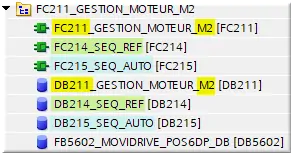
Figure 57 : groupe M2 FC211

Figure 58 : SEQ et Pas à pas M2
- Ouvrez le FC211 puis appelez le FB5602 et associer à sa création le DB d’instance « FB5602_MOVIDRIVE_POS6DP_DB ».

Figure 59 : FB5602 MoviDrive pos6DP nom
Explication FB MOVIDRIVE POSITIONNEMENT :
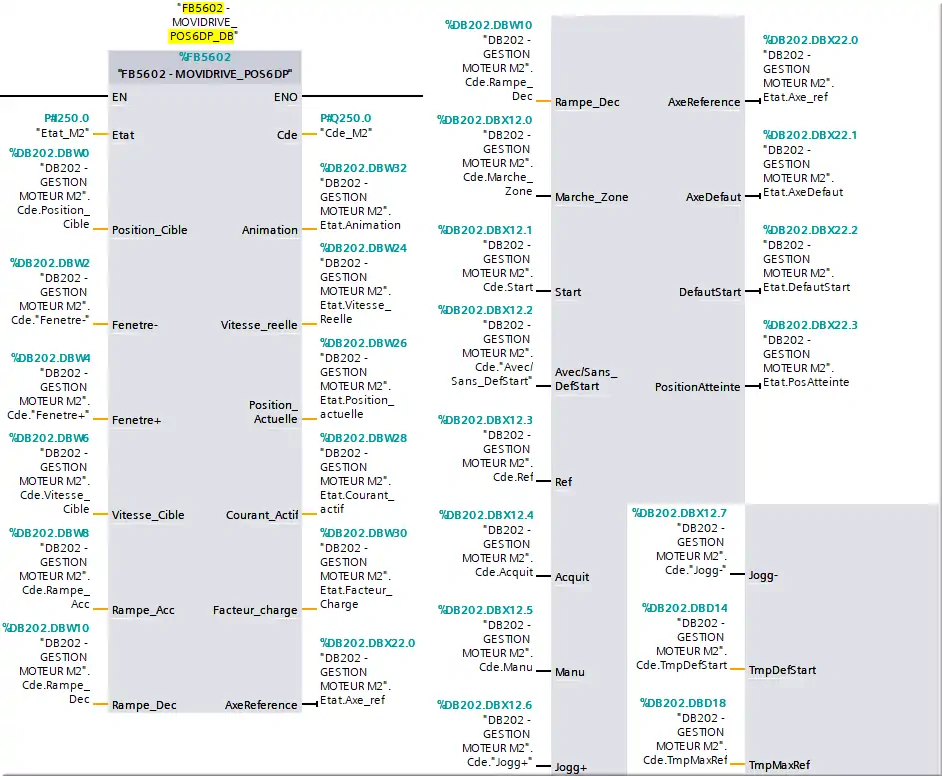
Figure 60 : FB5602 MoviDrive pos6DP variables
| Entrées | Commentaire |
|---|---|
| Etat | UDT Etat du Movidrive |
| Position_Cible | Position cible en mm |
| Fenetre- | Fenêtre de positionnement - |
| Fenetre+ | Fenêtre de positionnement + |
| Vitesse_Cible | Vitesse cible en mm/s ou mm/min |
| Rampe_Acc | Rampe d’accélération en ms |
| Rampe_Dec | Rampe de décélération en ms |
| Marche_Zone | Autorisation de marche |
| Start | Demande de déplacement |
| Avec/Sans_DefStart | Défaut start trop long |
| Ref | Demande de prise de référence |
| Acquit | Demande d’acquittement |
| Manu | Demande de mode manuel |
| Jogg + | Demande de déplacement positif manuel |
| Jogg - | Demande de déplacement négatif manuel |
| TmpDefStart | Temps avant défaut start |
| TmpMaxRef | Temps maximum de déplacement pour un référencement |
| Sorties | Commentaire |
|---|---|
| Cde | UDT Commande du Movidrive |
| Animation | Valeur pour l’animation du moteur |
|
|
1 = Gris = Variateur prêt, le moteur ne tourne pas |
|
|
2 = Vert = Marche var le moteur tourne |
|
|
3 = Rouge = Axe en défaut |
| Vitesse_Reelle | Vitesse réelle en mm/s ou mm/min |
| Position_Actuelle | Position actuelle mm |
| Courant_Actif | Courant actif en A |
| Facteur_Charge | Facteur de charge en % |
| AxeReference | Axe référencé |
| AxeDefaut | Axe en défaut |
| DefautStart | Défaut start trop long par rapport au temps max d’un déplacement |
| PositionAtteinte | Information position atteinte |
Toutes les variables seront dans le « DB211 – GESTION MOTEUR M2 »
Explication prise de référence pour le moteur M2 :
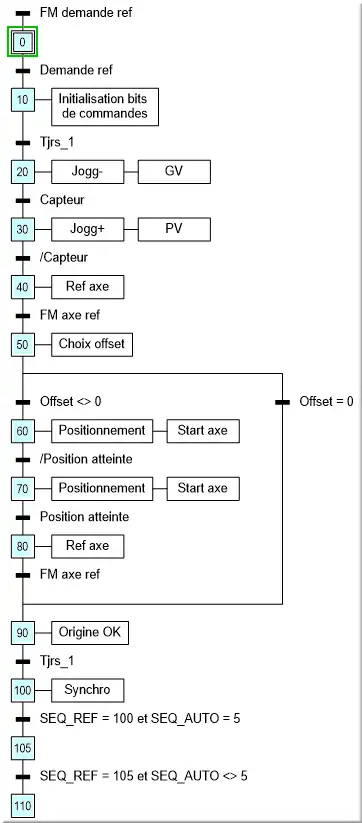
Figure 61 : M2 prise de référence pos6DP
Pour faire la prise de référence, on n’utilise pas la fonction du variateur pour pouvoir s’adapter à certains cas particuliers. Ici, pour faire le référencement on recule en grande vitesse jusqu’à atteindre le capteur. Ensuite on avance en petite vitesse jusqu’à perdre le capteur. La prise de référence est faite.
On peut ajouter un offset dans le cas où le capteur utilisé pour la prise de référence n’est pas positionné à l’endroit exact où on veut avoir notre référence.
Le grafcet de référencement est le même que pour le modulo sauf à l’étape 10 où on va activer la commande « JOGG- » à la place de la commande « JOGG+ ».
On ajoute ensuite un grafcet de production qui va permettre le déplacement automatique tant que l’axe est référencé.
Dans notre exemple, le but va être de faire varier la position. La première position à 720mm et la deuxième à 0mm. A chaque fois qu’une position est atteinte on attend 2s avant d’aller à la suivante.
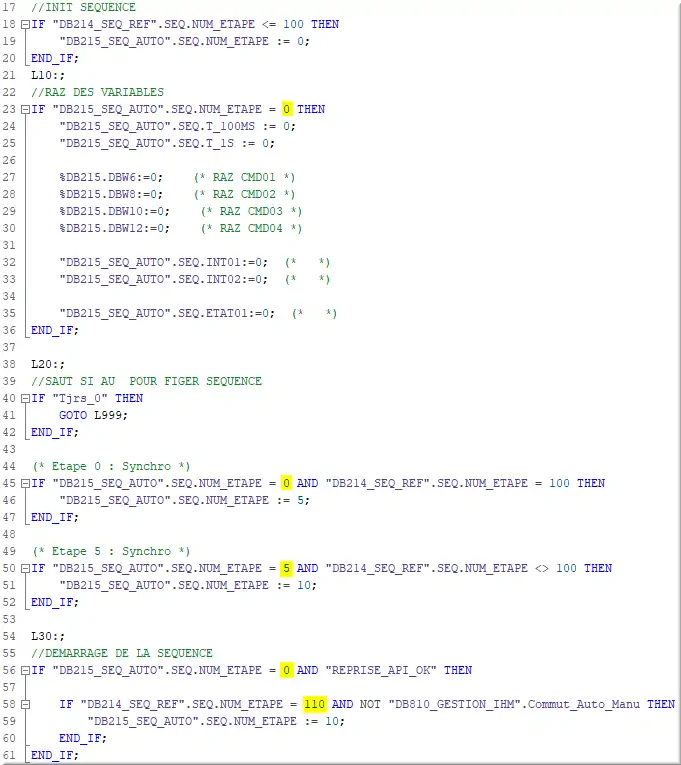
Figure 62 : M2 DB214 seq 0 start séquence
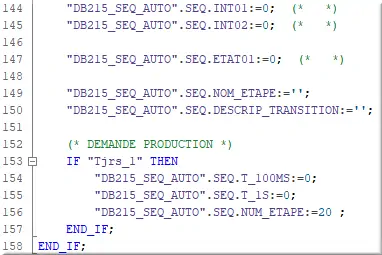
Figure 63 : M2 DB215 demande production
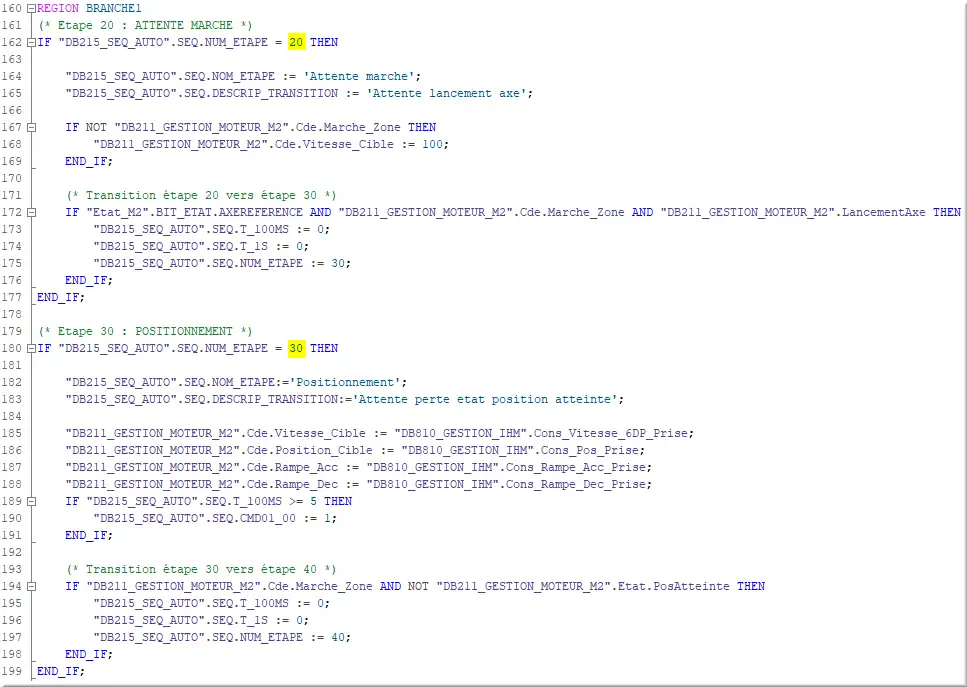
Figure 64 : M2 DB215 seq 20 attente marche

Figure 65 : M2 DB215 seq 40 position1
Comme pour l’indexeur modulo, les tempos permettent que le mode soit envoyé avant la commande start.
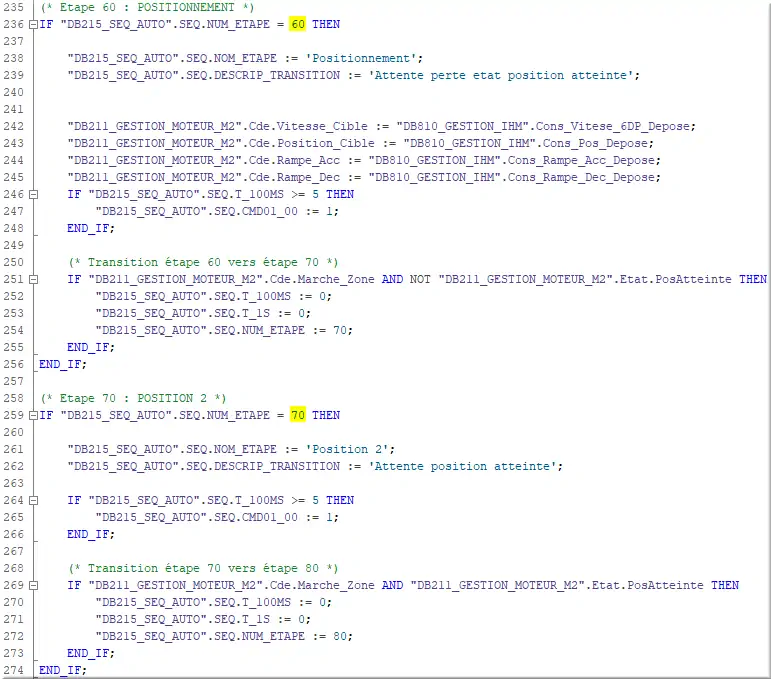
Figure 66 : M2 DB215 seq60 positionnement
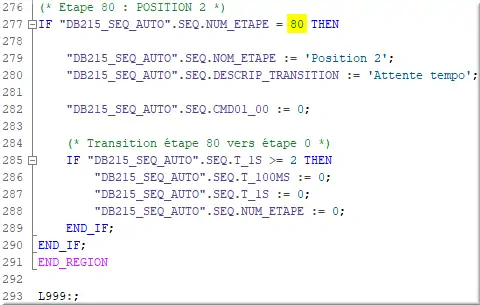
Figure 67 : M2 DB215 seq 80 position2
On ajoute dans le FC211 les réseaux d’activation des commandes.
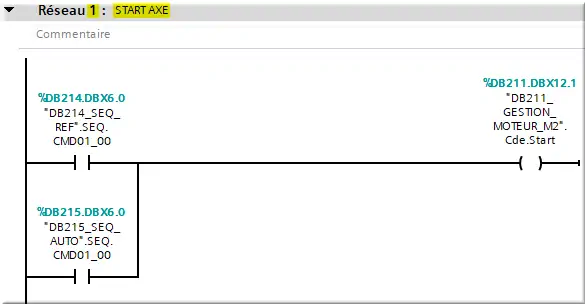
Figure 68 : M2 DB214 LD1 start axe
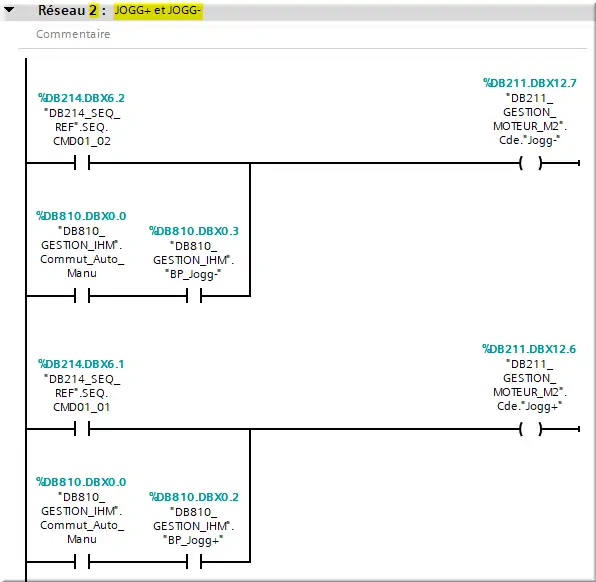
Figure 69 : M2 DB214 LD2 JOGG plus ou moins
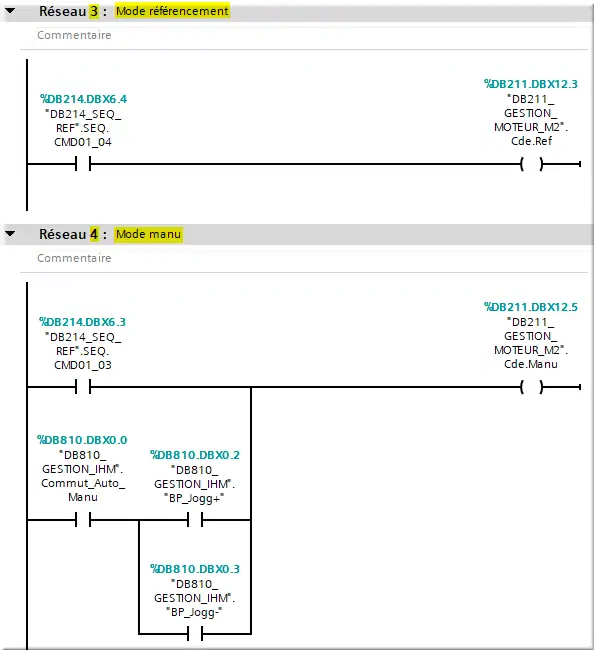
Figure 70 : M2 DB214 LD3 mode réf.
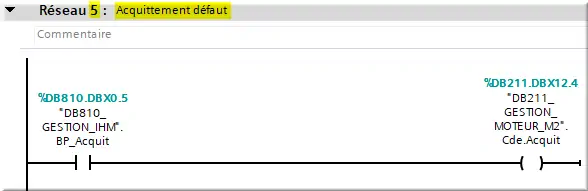
Figure 71 : M2 DB214 LD5 ack défaut
Remarque : pour le positionnement par bus 6DP, il n’y a pas à choisir de mode de fonctionnement comme on doit le faire pour le modulo. Il n’y a donc pas de réseau pour le choix du mode de fonctionnement.
2.4.2 IHM Pos6DP
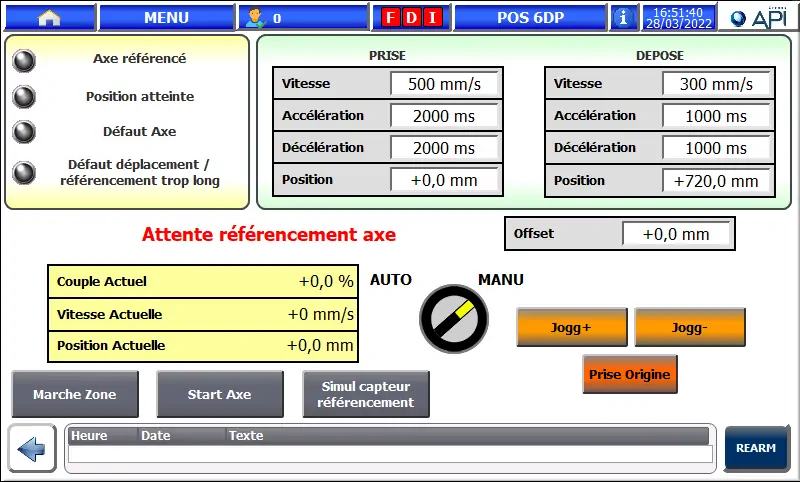
Figure 72 : Pos6DP manu
En mode MANU, possibilité d’envoyer les commandes « JOGG- » et « JOGG+ ». Le message « Attente référencement axe » clignote tant que l’axe n’est pas référencé. La prise d’origine peut se faire uniquement en mode MANU. En cas de défaut, le BP « Rearm » permet de l’acquitter. Les 3 BPs sur fond gris servent uniquement pour cet exercice.

Figure 73 : Pos6DP auto
Pour le fonctionnement de l’axe, ne pas oublier de repasser en mode AUTO. Ainsi l’axe fait ses déplacements entre ses 2 positions, ici entre 0mm et 720mm.
Toutes les variables de l’IHM sont dans le « DB810_GESTION_IHM »

Figure 74 : M2 DB810_GESTION_IHM nom
Les variables utilisées pour le modulo sont celles qui sont dans l’encadré.
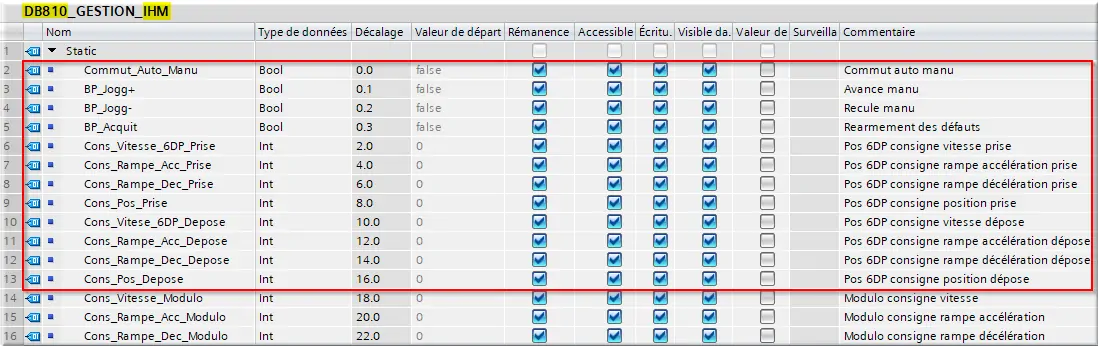
Figure 75 : M2 DB810_GESTION_IHM variable